Un corp aflat în mișcare de oscilatie întîmpină o rezistență din cauza forței de frecare Dacă frecvența de vibrație a corpului este mică, atunci forța de frecare depinde numai de viteza.Pentru viteze mici putem dezvolta forța de frecare în serie Taylor după puterile vitezei.Termenul de ordinul zero al seriei este nul, deoarece nici o forță de frecare nu acționează asupra unui corp imobil. Primul termen care nu se anulează este proporțional cu viteza:
(1)
unde r este coeficientul de frecare a corpului cu mediul în care oscilează.
Semnul minus arată că forța acționează în sens opus vtezei.
Deoarece asupra corpului acționează și forța elastică:
este coeficientul de amortizare temporală, iar este pulsația proprie (în absența frecărilor).
Ecuația (4) este ecuație omogenă cu coeficienți constanți, având soluția de forma:
(6)
unde și sunt constante.
Înlocuind (6) în (4) se obține ecuația caracteristică:
(7)
cu soluțiile:
(8)
Cazul frecărilor intense ()[]
În acest caz, rădăcinile ecuației caracteristice (8) sunt reale și negative:
(9)
Soluția cea mai generală a ecuației (4) este o suprapunere a două soluții liniar independente cu două constante arbitrare și
(10)
Constantele și se determină din condițiile inițiale (elongația și viteza la momentul ).
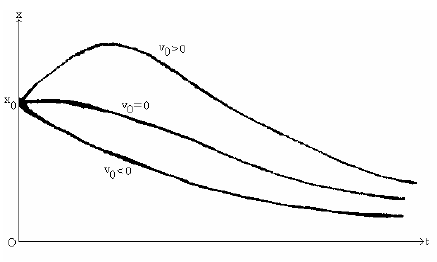
Aceasta este o mișcare aperiodică (neperiodică) amortizată.
Forma graficului elongației depinde de valoarea vitezei inițiale.
Cazul critic ()[]
În acest caz, rădăcinile ecuației caracteristice (8) sunt egale:
Soluția obținută din (6), nu este completă, deoarece din punct de vedere matematic soluția unei ecuații diferențiale de ordinul doi trebuie să aibă două constante arbitarare.
Din punct de vedere fizic, cele două constante ar permite specificarea condițiilor inițiale (poziția și viteza).
De aceea folosim metoda variației parametrilor, luând o soluție de forma:
(11)
Impunând ca soluția (11) să verifice ecuația (4), obținem: