Definiţie .
Fie
(
V
,
K
)
{\displaystyle (V, K) \!}
spaţiu vectorial de tip finit şi
M
⊂
V
,
M
≠
∅
.
{\displaystyle M\subset V,\;M\neq \emptyset .\!}
acoperirea liniară a lui M sau M şi se notează
L
(
M
)
{\displaystyle L(M)\!}
h
M
i
{\displaystyle {\mathcal {h}}M{\mathcal {i}}\!}
S
p
a
n
(
M
)
{\displaystyle Span(M)\!}
L
(
M
)
=
{
∑
i
=
1
n
α
i
x
i
|
n
∈
N
∗
,
α
i
∈
K
,
x
i
∈
M
,
i
=
1
,
n
¯
}
.
{\displaystyle L(M)=\left\{\sum _{i=1}^{n}\alpha _{i}x_{i}\;|\;n\in \mathbb {N} ^{*},\;\alpha _{i}\in K,\;x_{i}\in M,\;i={\overline {1,n}}\right\}.\!}
Propoziţie .
L
(
M
)
{\displaystyle L(M)\!}
(
V
,
K
)
{\displaystyle (V, K) \!}
Observaţia 1 .
L
(
M
)
=
L
(
B
)
{\displaystyle L(M)=L(B)\!}
B este o familie liniar independentă, maximală, conţinută în M .
Observaţia 2 .
Pentru a găsi o bază în
L
(
M
)
{\displaystyle L(M)\!}
M o familie maximală de vectori liniar independenţi.
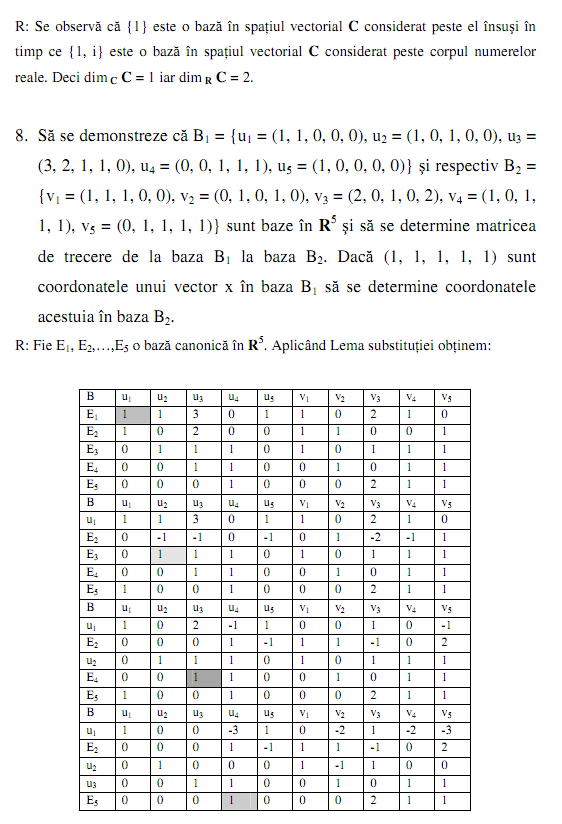
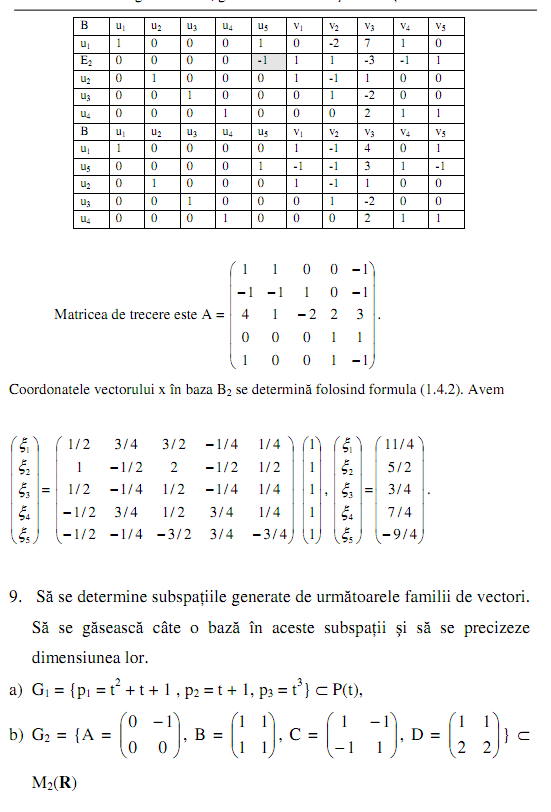
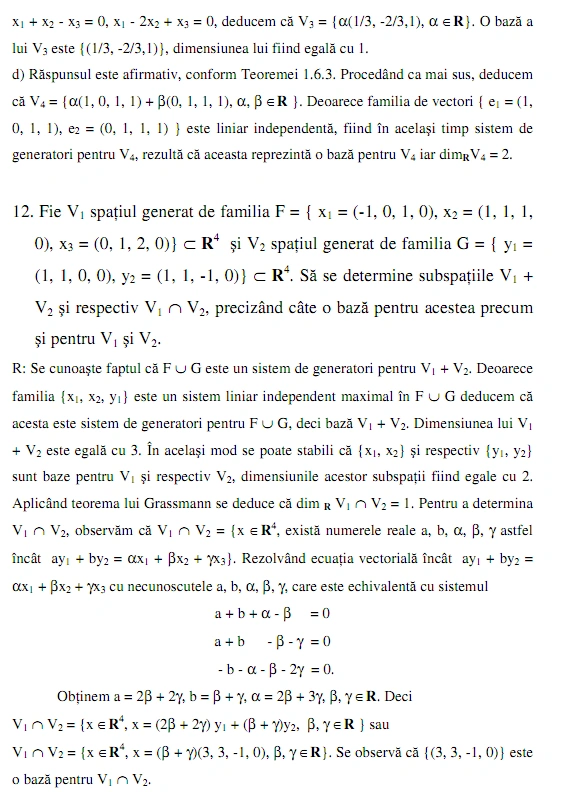
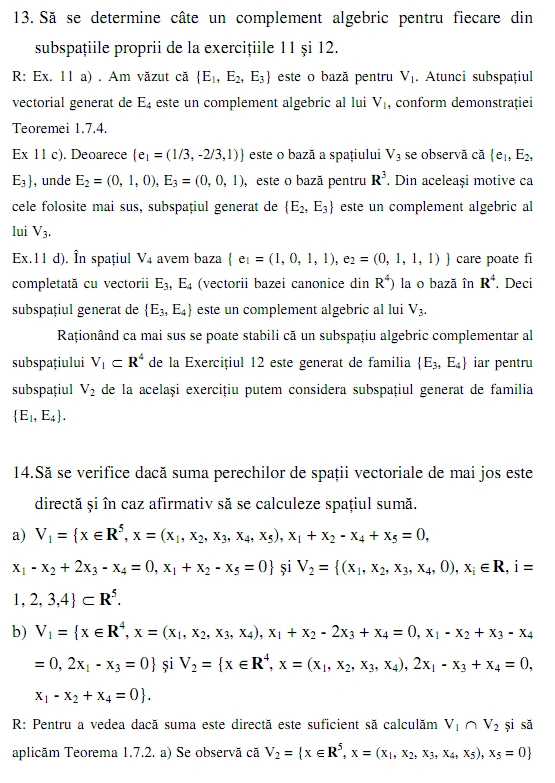
PROBLEME REZOLVATE
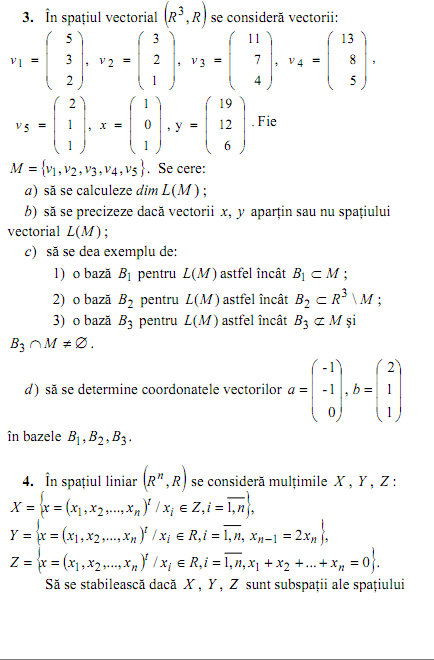
1 . În spaţiul vectorial
(
R
3
,
R
)
{\displaystyle (\mathbb R^3, \mathbb R) \!}
v
1
=
(
1
2
1
)
,
v
2
=
(
2
3
1
)
,
v
3
=
(
3
5
8
)
,
v
4
=
(
5
8
3
)
,
{\displaystyle v_{1}={\begin{pmatrix}1\\2\\1\end{pmatrix}},\;v_{2}={\begin{pmatrix}2\\3\\1\end{pmatrix}},\;v_{3}={\begin{pmatrix}3\\5\\8\end{pmatrix}},\;v_{4}={\begin{pmatrix}5\\8\\3\end{pmatrix}},\!}
v
5
=
(
4
7
3
)
,
x
=
(
5
9
4
)
,
y
=
(
1
1
1
)
.
{\displaystyle v_{5}={\begin{pmatrix}4\\7\\3\end{pmatrix}},\;x={\begin{pmatrix}5\\9\\4\end{pmatrix}},\;y={\begin{pmatrix}1\\1\\1\end{pmatrix}}.\!}
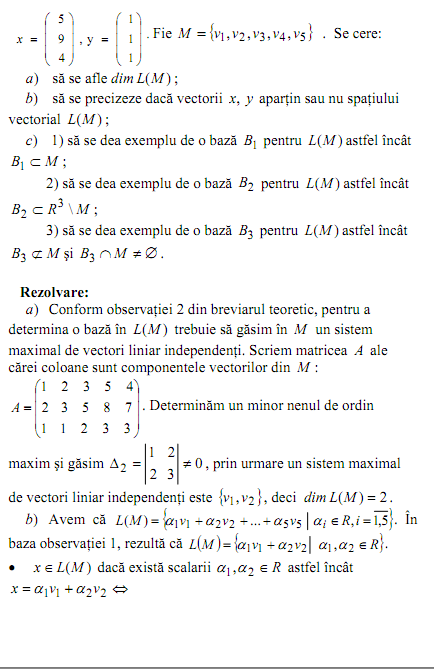
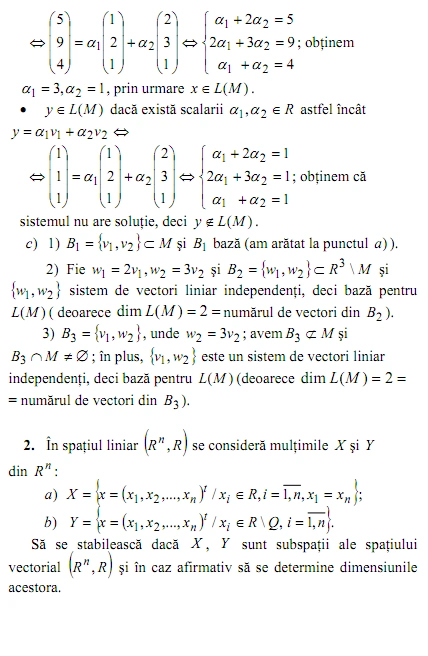
Fie
M
=
{
v
1
,
v
2
,
v
3
,
v
4
,
v
5
}
.
{\displaystyle M=\{v_{1},v_{2},v_{3},v_{4},v_{5}\}.\!}
Vezi şi [ ] Resurse [ ]