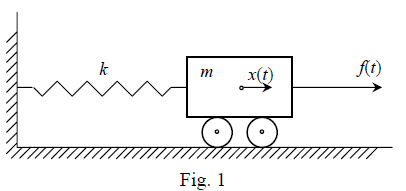
Considerăm un sistem oscilant cu un singur grad de libertate format dintr-o masă m și un element elastic (un arc) ca în figura 1.
Presupunem că asupra masei m, redusă la un punct material, acționează o forță perturbatoare F(t), care determină o deplasare pe orizontală notată cu x(t).
În orice moment t al mișcării, punctul material se află în echilibru sub acțiunea următoarelor forțe: forța elastică forța de inerție și forța perturbatoare F(t) (fig. 2).
Așadar avem:
Pentru deplasări mici, forța elastică este proporțională cu deplasarea (legea lui Hooke).
Deci
unde k este coeficientul de rigiditate și se definește ca fiind forța necesară pentru a produce o deplasare unitară pe direcția acestei forțe.
Inversul coeficientului de rigiditate se numește flexibilitatea elementului elastic.
Se obține astfel următoarea ecuație diferențială:
Dacă presupunem, în plus, că există și o forță de frecare proporțională cu viteza de deplasare, atunci ecuația devine:
(1)
Constanta c se numește coeficient de amortizare vâscoasă.
În continuare, notăm cu pulsația proprie a vibrației, care se definește prin și cu fracțiunea de amortizare critică, definită prin
Cu aceste notații ecuația (1) devine:
(2)
Ecuația (2) este o ecuație diferențială de ordinul doi, cu coeficienți constanți, neomogenă.
Ecuația omogenă asociată este:
(3)
și modelează cazul vibrațiilor libere cu amortizare vâscoasă.
Ecuația caracteristică este:
și admite soluțiile:
Dacă notăm cu atunci soluția generală a ecuației omogene (3), care corespunde vibrațiilor libere, se notează cu și este:
Ecuația neomogenă (2) modelează cazul vibrațiilor forțate cu amortizare vâscoasă.
În continuare, vom presupune că forța perturbatoare F(t) este de forma:
unde este o constantă.
Ecuația neomogenă devine:
(4)
Căutăm soluția particulară a ecuației neomogene, (corespunzătoare vibrațiilor forțate), de forma:
(5)
Punând condiția ca soluția (5) să verifice ecuația diferențială (4), obținem:
Identificând coeficienții lui și din cei doi membri, obținem sistemul:
care admite soluția:
și (6)
Soluția generală a ecuației neomogene (4) este:
(7)
Derivând (7), rezultă:
Vom determina soluțiile vibrațiilor stabilizate (staționare), care corespund condițiilor inițiale:
(8)
Din condițiile (8) deducem:
și (9)
ținând seama de (6) și (9), obținem:
(10)
Fie
și (11)
Observăm că expresia se poate prelucra astfel:
Fie deci
Atunci avem:
Pe de altă parte:
de unde deducem că:
(12)
ținând seama de (11), rezultă:
(13)
Dacă notăm și cu atunci
(14)
și așa cum s-a arătat mai sus, avem:
(15)
unde
ținând seama de (12), (13), (14), (15) în expresia soluției generale (10), rezultă:
(16)
unde
(17)
reprezintă coeficientul dinamic sau factorul de amplificare.
În sfârșit, dacă notăm cu atunci soluția căutată este:
unde
iar
Analizând soluția obținută, constatăm că primul termen, care modelează vibrațiile libere, este de forma:
soluție care exprimă o mișcare armonică cu pulsația și amplitudinea și care descrește exponențial în timp.
O asemenea mișcare se mai numește și cvasiarmonică și este reprezentată grafic în figura 3.
Figura 3
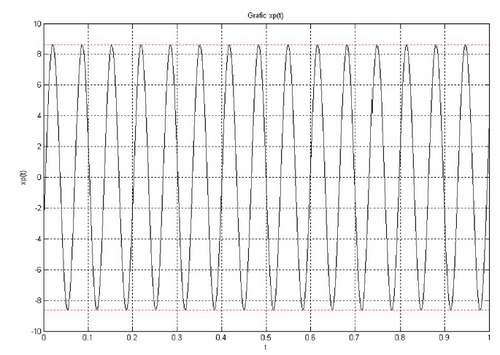
Soluția ecuației neomogene, care corespunde vibrațiilor forțate,
exprimă o mișcare armonică (sinusoidală) de pulsație și amplitudine B (figura 4).
Fig. 4
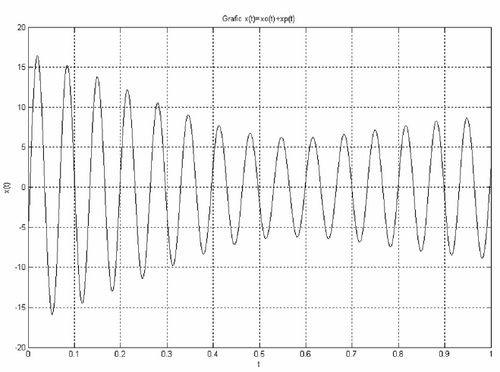
Când acțiunea forței perturbatoare este de lungă durată, vibrația totală, se reduce la vibrație forțată deoarece tinde la zero, datorită factorului În această situație, care interesează din punct de vedere practic, mișcarea capătă un caracter staționar.
Graficul soluției care se obține prin însumarea graficelor din figurile 3 și 4, arată ca în figura 5.
Fig. 5
În cazul lipsei forței de amortizare vâscoasă avem:
Observăm că dacă situație care corespunde cazului de rezonanță, devine infinit.
Această situație este ipotetică, deoarece, în realitate, sistemul are întotdeauna o amortizare internă, care limitează mărimea deplasărilor.
Să revenim la cazul general când Analizând amplitudinea soluției în acest caz, observăm că în zona rezonanței deplasările nu mai devin infinite, dar, în această zonă, amplitudinea are valori maximale.
Un grafic al factorului de amplificare în funcție de raportul și pentru diferite valori ale frecvenței este prezentat în figura 6.







































![{\displaystyle x(t)={\frac {F_{0}}{m\omega ^{2}[(1-({\frac {\theta }{\omega }})^{2})^{2}+4\nu ^{2}({\frac {\theta }{\omega }})^{2}]}}\{e^{-\nu \omega t}[{\frac {\theta }{\omega ^{*}}}(2\nu ^{2}+({\frac {\theta }{\omega }})^{2}-1)\sin \omega ^{*}t+2\nu {\frac {\theta }{\omega }}\cos \omega ^{*}t]+\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/786efc80cbfb5d6ea170a97d0b1c66cf2a3bcbfd)
![{\displaystyle +[\left(1-({\frac {\theta }{\omega }})^{2}\right)\sin \theta t-2\nu {\frac {\theta }{\omega }}\cos \theta t]\}.\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/345456334fa95f609a8395f70b89db34e036e21a)
![{\displaystyle \alpha ={\frac {\theta }{\omega ^{*}}}[2\nu ^{2}+({\frac {\theta }{\omega }})^{2}-1]\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/35d4f3a5d03afce33a6bc9c0e1cdfd1669abe349)









![{\displaystyle \alpha ^{2}+\beta ^{2}={\frac {\theta ^{2}}{\omega ^{2}(1-\nu ^{2})}}\left[(1-({\frac {\theta }{\omega }})^{2})^{2}+4\nu ^{2}({\frac {\theta }{\omega }})^{2}\right]\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/2820bfba7c704922e30b25d94f82b4e592180e6e)


![{\displaystyle \gamma ^{2}+\delta ^{2}=[1-({\frac {\theta }{\omega }})^{2}]^{2}+4\nu ^{2}({\frac {\theta }{\omega }})^{2}\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/cbdf780c8e281145c7eb71cd99482ae2f10225cd)























![{\displaystyle x_{F}(t)={\frac {F_{0}}{m\omega ^{2}\left[1-\left({\frac {\theta }{\omega }}\right)^{2}\right]}}\cdot \sin(\theta t+\psi ).\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/77faaa5cfcb74929ac1e9ba3f051a8e32a3faae5)







{kind=link}
{kind=link}
.png){kind=link}
{kind=link}