A nu se confunda cu termenul funcţională liniară !
Definiţii [ ] DEFINIŢIA 1 .
Fie V şi W două spaţii vectoriale de dimensiune finită peste un corp comutativ K .
O funcţie
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
operator liniar (sau transformare liniară , sau morfism de spaţii vectoriale ) dacă îndeplineşte următoarele condiţii:
(1)
U
(
x
+
y
)
=
U
(
x
)
+
U
(
y
)
,
∀
x
,
y
∈
V
;
{\displaystyle U (x+y) = U(x) + U(y), \; \forall x, y \in V; \!}
aditivitate
(2)
U
(
α
x
)
=
α
U
(
x
)
,
∀
α
∈
K
,
x
∈
V
.
{\displaystyle U (\alpha x) = \alpha U(x), \; \forall \alpha \in K, \; x \in V. \!}
omogenitate de gradul întâi .
În cazul în care
V
=
W
,
{\displaystyle V=W, \!}
U
:
V
→
V
{\displaystyle U: V \rightarrow V \!}
endomorfism .
Mulţimea operatorilor liniari definiţi pe V cu valori în W se notează
L
K
(
V
,
W
)
{\displaystyle L_K(V, W) \!}
L
(
V
,
W
)
{\displaystyle L(V, W) \!}
K se subînţelege).
Dacă
V
=
W
,
{\displaystyle V=W, \!}
L
K
(
V
)
{\displaystyle L_K(V) \!}
L
(
V
)
{\displaystyle L(V) \!}
L
(
V
,
W
)
{\displaystyle L(V, W) \!}
L
(
V
,
W
)
{\displaystyle L(V, W) \!}
OBSERVAŢIA 1.
a) Restricţia unui operator
U
∈
L
K
(
V
,
W
)
{\displaystyle U \in L_K (V, W) \!}
V
1
{\displaystyle V_1 \!}
U
|
V
1
;
{\displaystyle U| \; V_1; \!}
U
(
0
)
=
0
;
{\displaystyle U(0)=0; \!}
U
(
−
x
)
=
−
U
(
x
)
.
{\displaystyle U (-x) = - U(x). \!}
Afirmaţiile de la punctele b) şi c) se rezultă direct din definiţia de mai sus.
De exemplu, pentru a demonstra b) , luăm
α
=
0
{\displaystyle \alpha=0 \!}
U
(
α
x
)
=
α
U
(
x
)
{\displaystyle U(\alpha x) = \alpha U(x) \!}
U
(
0
)
=
0
⋅
U
(
x
)
=
0
,
{\displaystyle U(0) = 0 \cdot U(x) = 0, \!}
U
(
0
)
=
U
(
x
+
(
−
x
)
)
=
U
(
x
)
+
U
(
−
x
)
,
{\displaystyle U(0)=U(x+(-x)) = U(x) + U (-x), \!}
b) şi obţinem c) .
OBSERVAŢIA 2.
Fie V şi W două spaţii vectoriale peste un corp comutativ K .
O funcţie
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
x
,
y
∈
V
{\displaystyle x, y \in V \!}
α
,
β
∈
K
{\displaystyle \alpha, \beta \in K \!}
(3)
U
(
α
x
+
β
y
)
=
α
U
(
x
)
+
β
U
(
y
)
.
{\displaystyle U(\alpha x + \beta y) = \alpha U (x) + \beta U(y). \!}
Într-adevăr, dacă
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
U
(
α
x
+
β
y
)
=
U
(
α
x
)
+
U
(
β
y
)
=
α
U
(
x
)
+
β
U
(
y
)
,
{\displaystyle U(\alpha x + \beta y) = U (\alpha x) + U(\beta y) = \alpha U(x) + \beta U(y),\!}
x
,
y
∈
V
{\displaystyle x, y \in V \!}
α
,
β
∈
K
.
{\displaystyle \alpha, \beta \in K. \!}
Reciproc, presupunem că pentru orice
x
,
y
∈
V
{\displaystyle x, y \in V \!}
α
,
β
∈
K
.
{\displaystyle \alpha, \beta \in K. \!}
α
=
β
=
1
{\displaystyle \alpha = \beta = 1 \!}
U
(
x
+
y
)
=
U
(
x
)
+
U
(
y
)
.
{\displaystyle U(x+y)=U(x)+U(y). \!}
β
=
0
{\displaystyle \beta=0 \!}
U
(
α
x
)
=
α
U
(
x
)
.
{\displaystyle U (\alpha x) = \alpha U(x). \!}
PROPOZIŢIE
Dacă
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
(4)
U
(
0
V
)
=
0
W
.
{\displaystyle U(0_V) = 0_W. \!}
EXEMPLU
Considerăm spaţiile vectoriale
R
2
{\displaystyle \mathbb R^2 \!}
R
3
{\displaystyle \mathbb R^3 \!}
R
.
{\displaystyle \mathbb R. \!}
a)
U
:
R
2
→
R
3
,
U
(
x
)
=
(
x
1
+
2
x
2
,
x
2
,
x
1
−
x
2
)
,
x
=
(
x
1
,
x
2
)
∈
R
2
.
{\displaystyle U: \mathbb R^2 \rightarrow \mathbb R^3, \; U(x ) =( x_1+2x_2, x_2, x_1-x_2),\; \; x = (x_1, x_2) \in \mathbb R^2.\!}
b)
U
:
R
3
→
R
2
,
U
(
x
)
=
(
x
1
+
x
3
,
x
2
,
x
3
)
,
x
=
(
x
1
,
x
2
,
x
3
)
∈
R
3
.
{\displaystyle U: \mathbb R^3 \rightarrow \mathbb R^2, \; U(x ) =( x_1+x_3, x_2, x_3),\; \; x = (x_1, x_2, x_3) \in \mathbb R^3.\!}
U este un operator liniar, Într-adevăr, fie
α
,
β
∈
R
{\displaystyle \alpha, \beta \in \mathbb R \!}
x
=
(
x
1
,
x
2
)
,
y
=
(
y
1
,
y
2
)
∈
R
3
.
{\displaystyle x= (x_1, x_2), \; y= (y_1, y_2) \in \mathbb R^3. \!}
α
x
+
β
y
=
(
α
x
1
+
β
y
1
,
α
x
2
+
β
y
2
)
.
{\displaystyle \alpha x + \beta y = (\alpha x_1 + \beta y_1, \alpha x_2 + \beta y_2). \!}
Folosind Observaţia 3.1.2, avem
U
(
α
x
+
β
y
)
=
{\displaystyle U (\alpha x + \beta y) =\!}
=
(
α
x
1
+
β
y
1
+
2
α
x
2
+
2
β
y
2
,
α
x
2
+
β
y
2
,
α
x
1
+
β
y
1
−
(
α
x
2
+
β
y
2
)
)
=
{\displaystyle = (\alpha x_1 + \beta y_1 + 2 \alpha x_2 + 2 \beta y_2, \alpha x_2 + \beta y_2, \alpha x_1 + \beta y_1 - (\alpha x_2 + \beta y_2)) =\!}
=
(
α
x
1
+
2
x
2
+
β
(
y
1
+
2
y
2
)
,
α
x
2
+
β
y
2
,
α
(
x
1
−
x
2
)
+
β
(
y
1
−
y
2
)
)
=
{\displaystyle =( \alpha x_1 + 2 x_2 + \beta (y_1 +2y_2), \alpha x_2 + \beta y_2, \alpha(x_1-x_2) + \beta(y_1-y_2))=\!}
=
(
α
(
x
1
+
2
x
2
)
,
α
x
2
,
α
(
x
1
−
x
2
)
+
β
(
y
1
+
2
y
2
)
,
β
y
2
,
β
(
y
1
−
y
2
)
)
=
{\displaystyle = (\alpha (x_1+2x_2), \alpha x_2, \alpha (x_1-x_2) + \beta (y_1+2y_2), \beta y_2, \beta (y_1-y_2)) = \!}
=
α
(
x
1
+
2
x
2
,
x
2
,
x
1
−
x
2
)
+
β
(
y
1
+
y
2
,
y
2
,
y
1
−
y
2
)
=
{\displaystyle = \alpha (x_1+2x_2, x_2, x_1-x_2) + \beta (y_1+y_2, y_2, y_1-y_2) =\!}
=
α
U
(
x
)
+
β
U
(
y
)
.
{\displaystyle = \alpha U(x) + \beta U(y). \!}
b) Deoarece, pentru
x
=
(
1
,
1
,
1
)
∈
R
3
{\displaystyle x= (1, 1, 1) \in \mathbb R^3 \!}
α
=
3
∈
R
{\displaystyle \alpha = 3 \in \mathbb R \!}
U
(
α
x
)
=
(
6
,
9
)
≠
3
(
2
,
1
)
=
α
U
(
x
)
{\displaystyle U (\alpha x) = (6, 9) \neq 3(2, 1) = \alpha U (x) \!}
U nu este un operator liniar.
DEFINIŢIA 2.
Fie spaţiile vectoriale
(
V
,
K
)
{\displaystyle (V, K) \!}
(
W
,
K
)
,
{\displaystyle (W, K), \!}
d
i
m
V
=
m
,
d
i
m
W
=
n
,
m
,
n
∈
N
{\displaystyle dim \; V = m, \; dim \; W=n, \; m,n \in \mathbb N \!}
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
F
=
{
f
1
,
f
2
,
⋯
,
f
m
}
{\displaystyle F = \{ f_1, f_2, \cdots , f_m \} \!}
(
V
,
K
)
{\displaystyle (V, K) \!}
G
=
{
g
1
,
g
2
,
⋯
,
g
n
}
{\displaystyle G = \{ g_1, g_2, \cdots , g_n \} \!}
(
W
,
K
)
.
{\displaystyle (W, K) .\!}
matricea operatorului liniar V corespunzătoare bazelor F şi G matricea
A
∈
M
m
,
n
(
K
)
{\displaystyle A \in M_{m, n} (K) \!}
U
(
f
1
)
,
U
(
f
2
)
,
⋯
,
U
(
f
m
)
{\displaystyle U(f_1), U(f_2), \cdots , U(f_m) \!}
G , adică
A
=
(
U
(
f
1
)
G
U
(
f
2
)
G
⋯
U
(
f
m
)
G
)
t
.
{\displaystyle A = (U(f_1)_G \;U(f_2)_G \; \cdots \;U(f_m)_G \; )^t. \!}
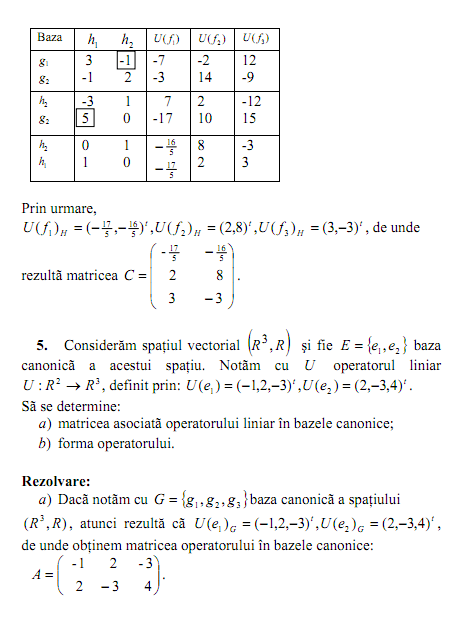
Reprezentarea operatorului liniar U în bazele F şi G este dată de formula:
U
(
x
)
G
=
A
t
x
F
.
{\displaystyle U(x)_G= A^t x_F. \!}
F şi G sunt bazele canonice ale spaţiilor
(
V
,
K
)
{\displaystyle (V, K) \!}
(
W
,
K
)
,
{\displaystyle (W, K), \!}
U este:
U
(
x
)
=
A
t
x
.
{\displaystyle U(x ) = A^t x. \!}
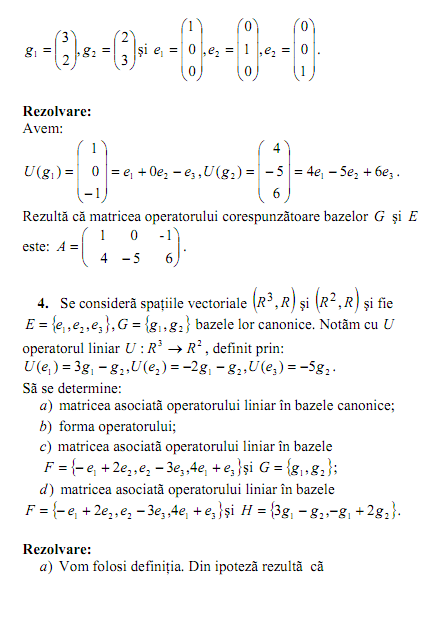
Modificarea matricei unui operator liniar la schimbarea bazelor în care se reprezintă [ ] Fie
U
:
V
→
W
{\displaystyle U: V \rightarrow W \!}
F , F' două baze ale spaţiului liniar
(
V
,
K
)
{\displaystyle (V, K) \!}
G , G' două baze ale spaţiului liniar
(
W
,
K
)
.
{\displaystyle (W, K) .\!}
Fie
A
=
A
F
,
G
{\displaystyle A = A_{F, G} \!}
B
=
A
F
′
,
G
′
{\displaystyle B = A_{F', G'} \!}
F şi G , respectiv bazelor F' şi G' .
Fie C matricea de trecere de la baza F la baza F' şi D este matricea de trecere de la baza G la baza G' .
Atunci
B
t
=
D
−
1
⋅
A
t
⋅
C
.
{\displaystyle B^t = D^{-1} \cdot A^t \cdot C. \!}
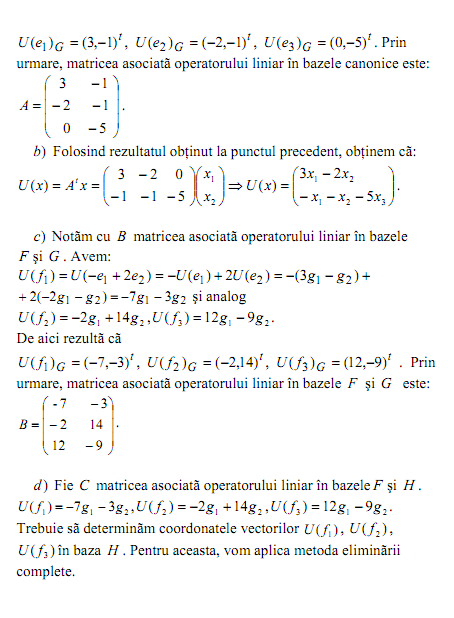
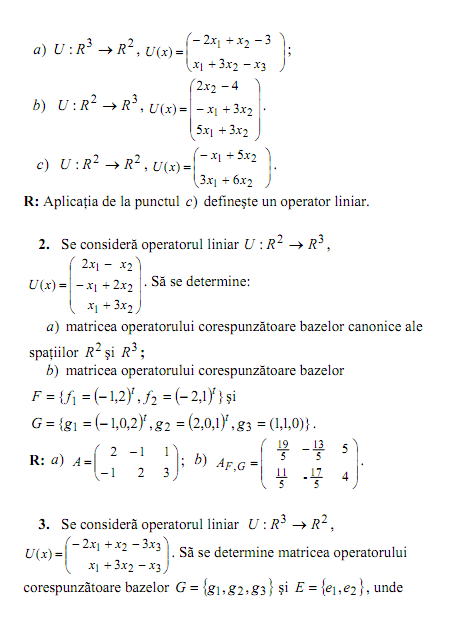
Probleme rezolvate [ ] 1 . Să se determine care dintre următoarele aplicaţii defineşte un operator liniar:
a)
U
:
R
3
→
R
2
,
U
(
x
)
=
(
4
x
1
−
x
2
+
3
x
3
−
x
1
+
2
x
2
+
x
3
)
{\displaystyle U: \mathbb R^3 \rightarrow \mathbb R^2, \; U(x) = \begin{pmatrix} 4 x_1 - x_2 + 3 x_3 \\ -x_1 + 2 x_2 + x_3 \end{pmatrix} \!}
b)
U
:
R
2
→
R
3
,
U
(
x
)
=
(
x
1
−
4
2
−
2
x
1
+
3
5
x
1
−
x
2
)
.
{\displaystyle U: \mathbb R^2 \rightarrow \mathbb R^3, \; U(x) = \begin{pmatrix} x_1 - 4 _2 \\ -2 x_1 + 3 \\ 5 x_1 - x_2 \end{pmatrix}. \!}
Rezolvare :
a) Fie
α
,
β
∈
R
3
;
{\displaystyle \alpha, \beta \in \mathbb R^3; \!}
U
(
α
x
+
β
y
)
=
U
(
α
x
1
+
β
y
1
α
x
2
+
β
y
2
α
x
3
+
β
y
3
)
=
(
4
(
α
x
1
+
β
x
1
)
−
(
α
x
2
+
β
x
2
)
+
3
(
α
x
3
+
β
x
3
)
−
(
α
x
1
+
β
x
1
)
+
2
(
α
x
2
+
β
x
2
)
+
(
α
x
3
+
β
x
3
)
)
=
{\displaystyle U (\alpha x + \beta y) = U \begin{pmatrix} \alpha x_1 + \beta y_1 \\ \alpha x_2 + \beta y_2 \\ \alpha x_3 + \beta y_3 \end{pmatrix} = \begin{pmatrix} 4(\alpha x_1 + \beta x_1) - (\alpha x_2 + \beta x_2) +3 (\alpha x_3 + \beta x_3) \\ -(\alpha x_1 + \beta x_1) +2 (\alpha x_2 + \beta x_2) + (\alpha x_3 + \beta x_3) \end{pmatrix} = \!}
=
(
4
α
x
1
−
α
x
2
+
3
α
x
3
−
α
x
1
+
2
α
x
2
+
α
x
3
)
+
(
4
β
x
1
−
β
x
2
+
3
β
x
3
−
β
x
1
+
2
β
x
2
+
β
x
3
)
=
α
U
(
x
)
+
β
U
(
y
)
;
{\displaystyle = \begin{pmatrix} 4 \alpha x_1 - \alpha x_2 + 3 \alpha x_3 \\ - \alpha x_1 +2 \alpha x_2 + \alpha x_3 \end{pmatrix} + \begin{pmatrix} 4 \beta x_1 - \beta x_2 + 3 \beta x_3 \\ - \beta x_1 +2 \beta x_2 + \beta x_3 \end{pmatrix} = \alpha U(x) + \beta U(y); \!}
b) Metoda I . Fie
α
,
β
∈
R
2
,
x
,
y
∈
R
2
.
{\displaystyle \alpha , \beta \in \mathbb R^2, \; x, y \in \mathbb R^2. \!}
U
(
α
x
+
β
y
)
=
U
(
α
x
1
+
β
y
1
α
x
2
+
β
y
2
)
=
{\displaystyle U(\alpha x + \beta y) = U \begin{pmatrix} \alpha x_1 + \beta y_1 \\ \alpha x_2 + \beta y_2 \end{pmatrix}= \!}
=
(
(
α
x
1
+
β
y
1
)
−
4
(
α
x
2
+
β
y
2
)
−
2
(
α
x
1
+
β
y
1
)
+
3
5
(
α
x
1
+
β
y
1
)
−
(
α
x
2
+
β
y
2
)
)
=
(
α
x
1
+
β
y
1
−
4
α
x
2
−
4
β
y
2
−
2
α
x
1
−
2
β
y
1
+
3
5
α
x
1
+
5
β
y
1
−
α
x
2
−
β
y
2
)
{\displaystyle = \begin{pmatrix} (\alpha x_1 + \beta y_1) - 4 (\alpha x_2 + \beta y_2) \\ -2 (\alpha x_1 + \beta y_1) +3 \\ 5 (\alpha x_1 + \beta y_1) - (\alpha x_2 + \beta y_2) \end{pmatrix} = \begin{pmatrix} \alpha x_1 + \beta y_1 - 4 \alpha x_2 -4 \beta y_2 \\ -2 \alpha x_1 -2 \beta y_1 +3 \\ 5 \alpha x_1 +5 \beta y_1 - \alpha x_2 - \beta y_2 \end{pmatrix} \!}
(1)
α
U
(
x
)
+
β
U
(
y
)
=
α
(
x
1
−
4
x
2
−
2
x
1
+
3
5
x
1
−
x
2
)
+
β
(
y
1
−
4
y
2
−
2
y
1
+
3
5
y
1
−
y
2
)
=
(
α
x
1
+
β
y
1
−
4
α
x
2
−
4
β
y
2
−
2
α
x
1
−
2
β
y
1
+
3
α
+
3
β
5
α
x
1
+
5
β
y
1
−
α
x
2
−
β
y
2
)
{\displaystyle \alpha U(x) + \beta U(y) = \alpha \begin{pmatrix} x_1 - 4 x_2 \\ -2 x_1 +3 \\ 5 x_1 - x_2 \end{pmatrix} + \beta \begin{pmatrix} y_1 - 4 y_2 \\ -2 y_1 +3 \\ 5 y_1 - y_2 \end{pmatrix} = \begin{pmatrix} \alpha x_1 + \beta y_1 - 4 \alpha x_2 -4 \beta y_2 \\ -2 \alpha x_1 -2 \beta y_1 +3 \alpha + 3 \beta \\ 5 \alpha x_1 +5 \beta y_1 - \alpha x_2 - \beta y_2 \end{pmatrix} \!}
(2) Din (1) şi (2) rezultă că relaţia (3) din definiţia operatorului liniar nu este îndeplinită
∀
α
,
β
∈
R
,
{\displaystyle \forall \alpha, \beta \in \mathbb R, \!}
U nu este operator liniar.
Metoda II .Dacă U ar f operator liniar, conform (4) ar trebui ca
U
(
0
R
2
)
=
0
R
2
.
{\displaystyle U(0_{\mathbb R^2}) = 0_{\mathbb R^2}. \!}
Dar
U
(
0
R
2
)
=
(
0
3
0
)
≠
0
R
2
,
{\displaystyle U(0_{\mathbb R^2}) = \begin{pmatrix} 0 \\ 3 \\ 0 \end{pmatrix} \neq 0_{\mathbb R^2}, \!}
U nu este operator liniar.
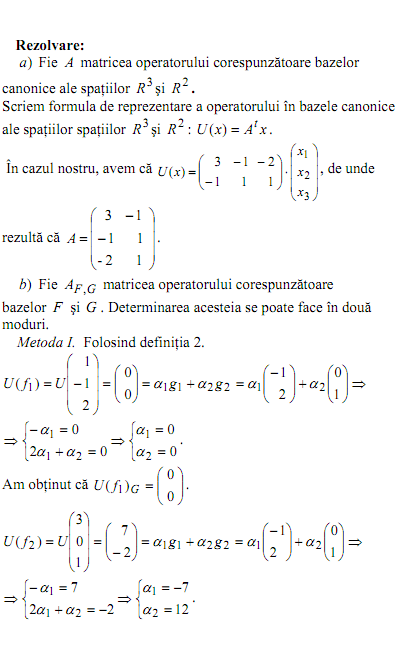
2 . Se consideră operatorul liniar
U
:
R
3
→
R
2
,
{\displaystyle U: \mathbb R^3 \rightarrow \mathbb R^2, \!}
U
(
x
)
=
(
3
x
1
−
x
2
−
2
x
3
−
x
1
+
x
2
+
x
3
)
.
{\displaystyle U(x) = \begin{pmatrix} 3 x_1 - x_2 - 2x_3 \\ - x_1 + x_2 + x_3 \end{pmatrix}. \!}
Să se determine:
a) matricea operatorului corespunzătoare bazelor canonice ale spaţiilor liniare
(
R
3
,
R
)
{\displaystyle (\mathbb R^3, R) \!}
(
R
2
,
R
)
;
{\displaystyle (\mathbb R^2, R); \!}
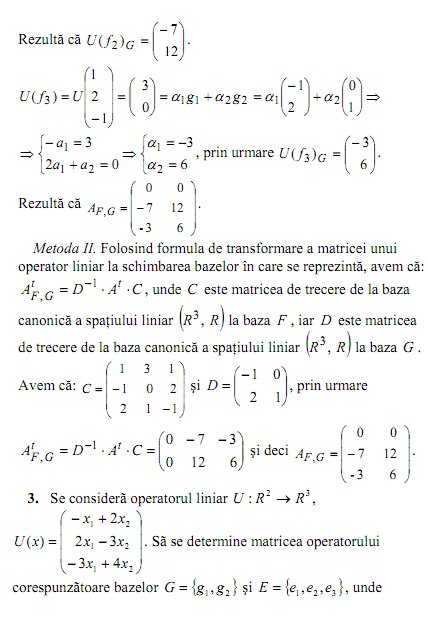
b) matricea operatorului corespunzătoare bazelor
F
=
{
f
1
=
(
1
,
−
1
,
2
)
t
,
f
2
=
(
3
,
0
,
1
)
t
,
f
3
=
(
1
,
2
,
−
1
)
t
}
{\displaystyle F= \{ f_1 = (1, \; -1, \; 2)^t, f_2 = (3, \; 0, \; 1)^t, f_3 = (1, \; 2, \; -1)^t \} \!}
şi
G
=
{
g
1
=
(
−
1
,
2
)
t
,
g
2
=
(
0
,
1
)
t
}
.
{\displaystyle G = \{ g_1 = (-1, \; 2)^t , g_2 = (0, \; 1)^t \}. \!}
Rezolvare :
a) Fie A matricea operatorului corespunzătoare bazelor canonice ale spaţiilor
R
3
{\displaystyle \mathbb R^3 \!}
R
2
.
{\displaystyle \mathbb R^2. \!}
Vezi şi [ ] Resurse [ ]