Definiţie[]
(din lat. acceleratio - "grabă") Acceleraţia este vectorul definit ca derivata vectorului viteză în raport cu timpul:
Acceleraţia reprezintă cresterea vitezei unui corp mobil in raport cu unitatea de timp. Schimbarea viteziei si/sau directiei unui corp produce acceleratie. Deceleratia este acceleratia negativa, adica scaderea vitezei. Unitatile de masura pentru acceleratie sunt (sistemul MKS) si (sistemul CGS).
Pentru a caracteriza variaţia in timp a vectorului viteză, se defineste o mărime fizică, denumită acceleraţie.
Suportul vectorului acceleraţie la un moment dat se află în planul osculator la traiectorie; în acelaşi plan, aflându-se de aceeaşi parte a tangentei ca şi versorul normalei principale.
Acceleraţiile tangenţială şi normală[]

Componentele acceleraţiei sunt:
- acceleraţie tangenţială: de-a lungul tangentei la traiectorie, având expresia în funcţie de abscisa curbilinie s:

- acceleraţie normală: de-a lungul normalei principale, având, în funcţie de abscisa curbiline, expresia:

unde este raza de curbură.

Avem una din formulele lui Frenet:

unde:
- s= coordonata curbilinie a mobilului;
- versorul tangentei la traiectorie, în sensul creşterii arcului s (a nu se confunda cu timpul t!);
- R= raza de curbură;
- unghiul la centru (măsurat în radiani) al coardei de lungime
- curbura (gradul de abatere a curbei de la o linie dreaptă)




De aici deducem:


şi obţinem relaţiile pentru acceleraţiile tangenţială şi normală:


În mişcarea plană, utilizând coordonatele polare şi vectorii corespunzători şi expresia acceleraţiei este:




Proiecţiile acceleraţiei pe şi , adică: şi se numesc acceleraţie radială şi, respectiv, acceleraţie transversală. Factorul se numeşte "accelerație unghiulară" şi se măsoară în





Acceleraţia absolută a unui punct material, notată este acceleraţia punctului material în raport cu un sistem de referință fix şi este suma vectorială a:

- acceleraţie relativă () acceleraţia calculată în mişcarea punctului material faţă de un reper mobil;

- acceleraţie de transport () acceleraţia unui punct solidar cu reperul mobil;

- acceleraţie Coriolis sau acceleraţie complementară () care este produsul vectorial dintre dublul vitezei unghiulare şi viteza relativă



Avem deci:

Acceleraţia medie[]
Ca si in cazul vitezei, se poate defini o acceleraţie medie si o acceleraţie instantanee. Acceleraţia medie este definită prin relaţia:
(1)

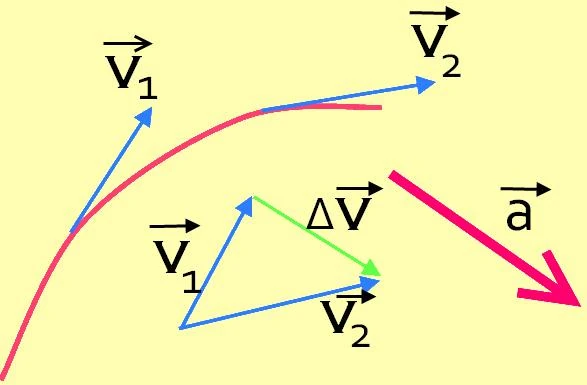
Mărimea acceleraţiei medii a unui mobil care se deplasează intre două puncte, de exemplu, si (Fig.1) depinde de variaţia netă a vitezei in intervalul considerat. Pentru precizarea ratei de variaţie in timp a vitezei instantanee se introduce noţiunea de acceleraţia instantanee, definită prin relaţia:



Variaţia vitezei în subintervalul i este

- (2)

- (3)



Acceleraţia este un vector care are orientarea lui Ea reprezintă derivata de ordinul intai a vitezei in raport cu timpul, prin urmare, derivata de ordinul doi a vectorului de poziţie, in raport cu acelasi parametru.


Avand in vedere definiţiile acceleraţiei medii si ale acceleraţiei instantanee, (3) si (4), se poate exprima acceleraţia medie si sub forma:
- (4)

Se poate introduce, ca si in cazul vitezei, o interpretare grafică. Pentru a determina variaţia
de viteză a mobilului, in condiţiile in care acceleraţia nu este constantă, impărţim intervalul
de timp in subintervale pe care acceleraţia isi păstrează valoarea constantă. Aria fiecărui
dreptunghi cu inălţimea a si lăţimea reprezintă chiar variaţia de viteză mobilului in acest interval de timp.
Sumand acum ariile tuturor dreptunghiurilor elementare, se obţine aria de sub curba vitezei
(analog cu situaţia prezentată in cazul vitezei).

- (5)

Ca urmare, variaţia de viteză are semnificaţia ariei de sub curba a = a(t), in intervalul de timp finit considerat. Considerand momentul iniţial t = 0, la un moment final oarecare, relaţia de mai sus se poate scrie, in cazul general:
- (6)

unde reprezintă viteza iniţială a corpului. In cazul particular, in care acceleraţia este
constantă, iar miscarea - unidimensională, relaţia (6) devine:

- (7)

iar
- (8)

(vezi articolul viteză) se scrie:
- (9)

Unitate de măsură[]
Ecuaţia dimensională a acceleraţiei este:
![{\displaystyle [a]=LT^{-2}\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/d2a9bc596e381959ba3724f9f219bce75f8c7e03)
astfel încât unitatea de măsură este

Dimensiunea si unitatea de măsură pentru acceleraţie sunt, respectiv:
- (10)
![{\displaystyle [a]={\frac {[\Delta v]}{\Delta t}}=LT^{-2};\!}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/fba9f6475f94bf95495a4939d3767b119e30f02d)
- (11)

{kind=link}
{kind=link}
{kind=link}
{kind=link}